Using Continuous Greedy Algorithm to Solve Multi-Robot Multi-Target Coverage Problem
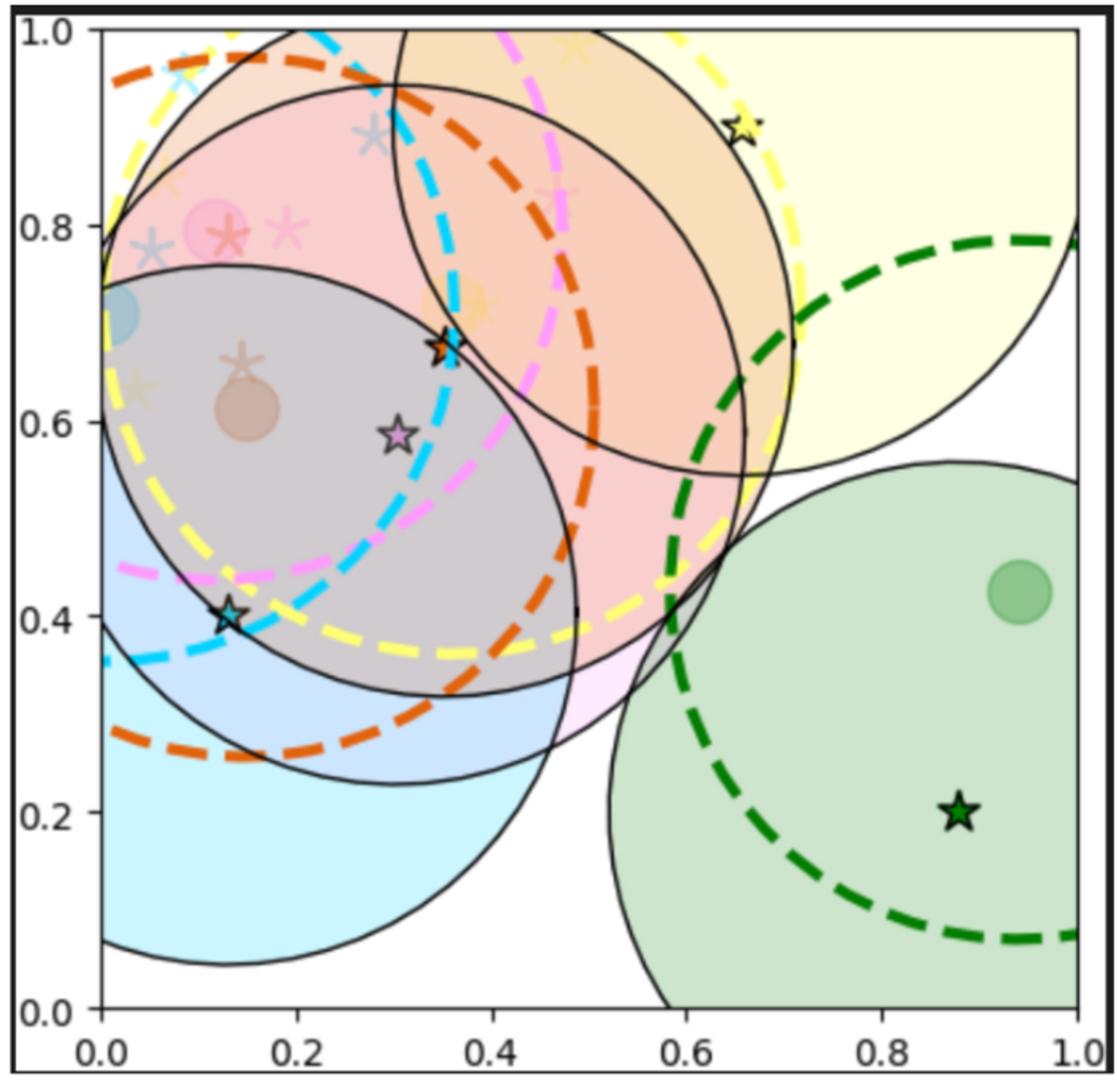
The Multi-Robot Multi-Target Tracking Problem involves multiple robots tracking multiple targets in an environment. The primary objective is to allocate the robots to the targets effectively and optimize their trajectories to ensure accurate monitoring of the targets. In this study, our focus is on maximizing the robots’ coverage of the targets.